IT之家于5月22日传来消息,科技媒体AppleInsider在前一天(即5月21日)发布了一篇博文,其中提到苹果公司近期公开了一种名为PH2D的新方法。这种方法将人类教练与机器人示范者相结合,用于训练人形机器人,从而显著提升了其学习效率。
苹果公司在本周三公布了《Humanoid Policy ~ Human Policy》这一研究论文,论文中明确指出了传统训练技术的缺陷,并在此基础上,提出了一种既具有扩展性又兼顾成本效益的新策略,该策略被命名为“PH2D”(Physical Human-Humanoid Data)。
苹果公司在其专利文件中提到,传统的人形机器人训练往往需要依赖示范者的操作,这一过程被形容为劳动密集型,并且还涉及到对昂贵远程操作数据的收集。
IT之家引用相关博文指出,苹果公司推出的新策略融合了人类教练与机器人演示者的优势,通过改良后的民用级设备,精心制作了用于训练的资料。
Apple Vision Pro 的头显现在仅通过左下方的摄像头来执行视觉观测任务,并与 ARKit 技术协同工作,以获取头部和手部的三维姿态信息;而经过改造的 meta Quest 头显则配备了 mini ZED 立体摄像头,使其成为一款低成本的高效训练设备。

教练人员运用这些工具来捕捉并保存人的手部动作细节,诸如握取、举起物品以及倾倒液体等行为,同时在录制时加入语音提示,待视频慢放后,这些资料将用于机器人的学习训练。
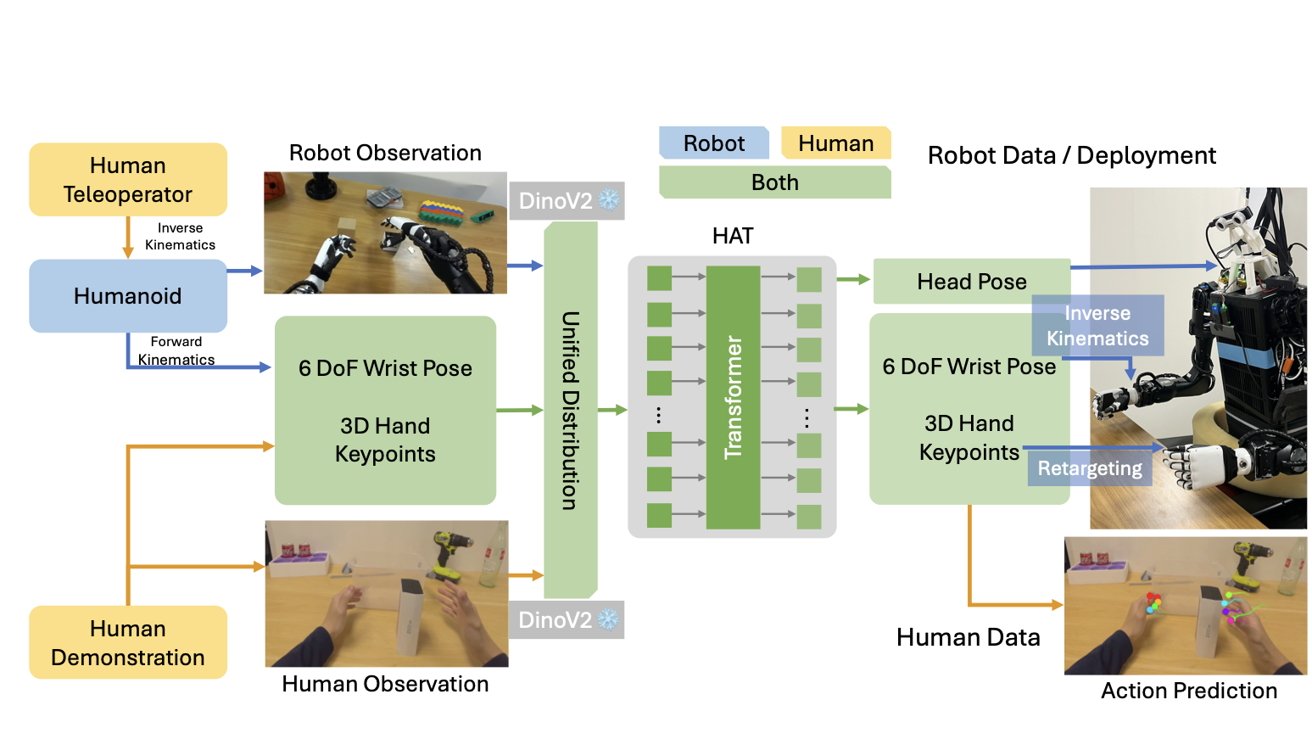
苹果公司特别研发了一个名为“人形机器人动作转换器”(HAT)的模型,此模型具备同时处理由人类教练和机器人示范者所产生数据的强大功能。
该模型设立了一个广泛适用的策略架构,与仅依赖实际机器人数据的训练方法相比,展现出更强的普遍适用性和稳定性。研究表明,这种融合的训练方法在特定任务,例如垂直抓取物体时,其表现要优于仅采用单一机器人示范者进行训练的效果。
苹果的研究发现,这种综合性的训练模式不仅具有很高的性价比,而且能够明显增强机器人的性能。尽管目前阶段仅展示了机器人的灯具原型,然而传闻中苹果公司正在秘密研发一款面向普通消费者的移动机器人,这款机器人能够完成家务以及一些基础任务。
