
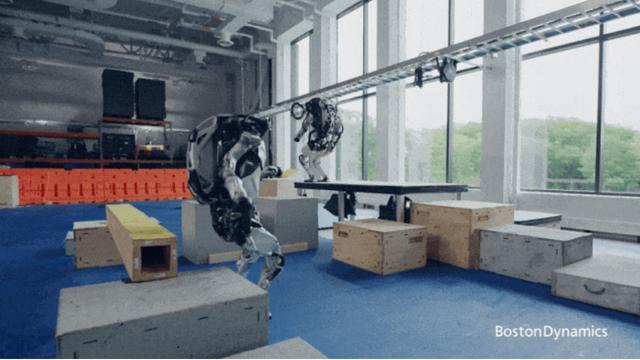
波士顿动力机器人能够后空翻,众擎机器人可以前空翻,宇树机器人能够侧空翻,波士顿动力还能侧翻……
机器人都在往「更像人」的动作上,“内卷”。
在众多形态各异的智能机器人里,人形机器人似乎总是能给人一种“更聪明”的感觉,也更有可能成为真正能和我们“玩到一块”的智能伙伴。
为啥就非得是人形?这要从三个"天生优势"说起:
适配人类环境是其天生的特性。例如,门把手通常会安装在抬手就能够拧到的位置,楼梯踏步的高度刚好能够一步跨上。
这类设计都是人类给自己设置的“特殊待遇”和“便捷方式”。人形机器人就如同拥有了乐园的通行票,打开冰箱、坐在马桶上以及使用手术刀等行为都无需对设备进行改造,因为人类早已将世界改造成了“只属于自己人”的游乐场。

人类偷师了百万年,拥有了外挂。例如波士顿动力将人类落地时膝盖的缓冲方式“复制粘贴”给了机器人,使得机器人从 2 米高处跳下能像猫一样稳当。
这些历经百万年人类进化所形成的“生存经验包”,也成为了机器人“学习的便捷途径”。

在应用场景中与人类无缝衔接
机器人递药片时肩膀倾斜的程度几乎难以察觉,仅有不到一根头发丝的差距。78%的老人会自然而然地伸手去接。这个动作的误差比眨眼还要小,就如同指纹解锁一般,打开了人脑的信任系统。
迪拜商场的小偷见到巡逻机器人就会绕道而行。因为巡逻机器人直立行走的形态具有威慑力,这种威慑力比轮式机器人的威慑力要强 2.3 倍。
当 Atlas 完成跳马动作时,这不仅是算法的胜利。它的髋关节结构与人类运动原理相契合,并且在其身体记忆中还储存着人类体操运动员的数据遗产。
这种共生关系中彼此相互包含。它就如同钢铁侠的贾维斯,贾维斯既是 AI 管家,又能成为人类认知的延伸镜。
这篇文章具体来聊聊,人形机器人为何是具身智能技术的最佳拍档?
“身体困境”与“人形破局”
认知科学的启示:身体即认知的边界
1980 年代,意大利的神经科学家在猕猴的大脑里发现了一类特别的神经元。当猴子自己去抓取食物的时候,这些神经元会激活;当猴子观察其他个体做相同动作的时候,这些神经元也会激活。这就是“镜像神经元”的首次被发现。它揭示了生物智能的一个核心规律,那就是认知能力与身体形态有着紧密的联系,智能不仅仅靠脑子,还得有一个能够动手干活的身体。
这一发现支撑了具身认知理论的一个核心观点,即智能不是单纯地依赖大脑进行计算,而是身体与环境相互作用所产生的结果。
人类婴儿学习的时候,在还没学会直立行走之前,他们的空间感知能力仅仅局限于爬行时的低视角;等到能够站立起来之后,视觉范围就扩大了 50%,并且物体距离的判断误差下降了 62%(这是《Developmental Science》2018 年的研究结果)。
这说明,身体形态直接决定了智能发展的边界。

星球大战中的机器人 C - 3PO 可以说是最早的“具身智能 + 人形机器人”在荧幕上的形象
麻省理工学院(MIT)在 2021 年进行了突破性实验。这一实验进一步验证了某一理论。研究者给相同的 AI 算法配置了三种不同形态的机器人,分别是轮式底盘、四足结构和类人双足。
在模拟家居场景里,双足机器人在开门任务中的学习速度比其他形态快 3.2 倍。双足机器人在上下楼梯任务中的学习速度也比其他形态快 3.2 倍。其原因是双足机器人的身体结构与人类环境高度匹配。因为身体结构匹配,所以算法能直接调用人类行为数据进行预训练。
苏黎世联邦理工学院(ETH Zurich)在 2023 年进行了对比实验。这个实验更有说服力。在模拟家庭环境里,人形机器人完成取物、清洁等任务的成功率达到了 82%。而四足机器人完成这些任务的成功率仅为 47%。差距的核心在于前者能够直接调用人类所积累的十亿小时量级的动作数据。当机械臂的长度与人类相近的时候,抓取冰箱食物的运动轨迹是可以直接复用 YouTube 上 700 万条相关视频数据的。
因此,在具身智能的发展路径里,人形结构是效率方面的最优解。同时,人形结构也是实现人机认知对齐的必要条件。
真实物理世界的适配性
地球上的物理设施,有 99.6%是为人类身体而设计的。(数据来源:国际标准化组织 ISO 2022 年报告)
门把手的安装高度在 94 到 116 厘米之间,这个高度对应着成人的肩部活动范围。楼梯踏步的垂直间距为 15 到 20 厘米,此间距与人类的步幅相匹配。这些参数共同构成了“人类中心主义”的技术壁垒。

图 2 展示人形机器人在工厂工作的场景:存在一个为方便人类工作而设计的流水线车间,人形机器人能够“无缝”地融入其中,并且不需要为机器人去调整流水线上的诸如零部件的托举高度、使用的工具等设置。

这种适配性,更体现在工具使用上。
人类工具的设计遵循着“生物力学黄金比例”,在一些产品上也被称作人体工程学。螺丝刀的握柄直径在 28 到 32 毫米之间,这个直径对应着成人手掌抓握的舒适区间。汽车方向盘的倾斜角度在 25 到 30 度之间,该倾斜角度匹配着前臂自然弯曲的弧度。
波士顿动力 Atlas 机器人设计手部结构是基于这些参数的,这样它就能够无需进行改造,直接操控现存的工具库。
这实际上是把人类 20 万年的工具使用历史转化成了具身智能的预训练数据集,这样就避免了四足或轮式机器人由于形态不同而导致的数据损耗,因为改造工具每年的平均成本超过 120 亿美元。
在具身智能的发展进程里,人形结构一方面是效率方面的最优解;另一方面,它更是突破人类技术生态壁垒的最大且可行的路径。
社会交互及情感需求为人形机器人打造具身基础
人类在社交过程中,有 55%的信息是通过肢体语言来进行传递的。(这就是 Mehrabian 定律所表明的情况。)
卡内基梅隆大学人机交互实验室有这样的发现:当机器人具有类人头部倾斜动作,且倾斜角度在 15 度内;同时具备 1.2 米/秒的步行速度,这个速度接近人类日常步频。在这种情况下,受试者对其指令的配合度提升了 30%。
这是因为这些参数引发了人脑中的一种认知模块。这种认知模块可以被理解为,相较于其他物种,人类更倾向于与同类进行交流和协作。
文化行为,也依赖身体形态的兼容性。
日本早稻田大学在礼仪机器人研发过程中发现:要实现 15 度的鞠躬动作,腰部关节至少需要 7 个自由度(DOF)。同时,传统工业机器人具备的腰部自由度仅为 3 - 4 个。
机器人能准确复现人类礼仪动作时,老年受试者的心理接受度有所提升,从 41%提升到了 79%。

提到文化行为,今年央视春晚的机器人扭秧歌是很有代表性的。 今年央视春晚的机器人扭秧歌在文化行为方面很有代表性。 央视春晚今年的机器人扭秧歌在文化行为中很有代表性。 今年央视春晚中机器人扭秧歌这一文化行为很有代表性。
这些科学证据都指向一个结论:人形机器人不是在追求外观像人一样。它是通过形态的拓扑同构这种方式,来突破具身智能在物理交互、数据获取以及社会融入等方面所存在的根本性限制。
机器人身体成为人类文明的“镜像接口”之时,智能进化的效率会有量级上的跃升。
我们准备好迎接机器人了吗?
具身智能为人形机器人开辟了新路径,促使机器人的进化加快。然而,该行业的发展尚处于初期阶段,对于未来趋势的判断也存在差异。一些技术专家认为 7 - 10 年机器人就能实现通用能力,而另一些则觉得需要更久的时间。这是由于在机器人的大脑和本体层面,从业者在技术路线上存在分歧。从“端到端”的架构角度来看,它的上限较高,不过却存在着“不可解释性”这一弊端,也就是人们所说的“黑箱”状态。由于不知道数据输入之后,中间经历了何种计算过程,所以科学家们也无法对机器人任务失败的原因进行解释。
在多数场景中,人们可以容忍机器人犯一定的错误。然而,在某些场合,如果要求必须分析原因并找到解决办法,这就会变得很困难。中国科学技术大学计算机科学与技术学院的教授、机器人技术标准创新基地的主任陈小平表示,这对机器人的落地应用构成了阻碍。“训练的时候效果不错,但使用的时候却不好,既不知道是何种原因,也不知道该如何进行修改。”有些用户可能会心里没底,他们不清楚你到底需要多少数据,也不清楚你缺少什么样的数据,这些都不明确,所以人家就很难配合你。
在数据层面,究竟需要何种数据,需要多大规模的数据,以及如何获取这些数据,整个行业形成了不同的流派。我们对不同的创业公司进行了采访,有的公司觉得真机数据最为重要。真机数据一般是由人类操作员通过遥控或者辅助机器人来进行任务操作而收集到的数据。这些公司会把机器人送至工厂,也会建设集中的数据采集场,然后部署众多操作人员和机器人去采集数据。另外,有些公司认为仿真数据是解决问题的关键,仿真数据是在计算机模型里模拟真实场景,对机器人进行虚拟训练后最终得到的数据。
人形机器人发展得很火热,大众的情绪也被带动到了这个地步。我们可以感受到自己正处在一轮技术发生巨大变化的浪潮里。然而,技术将会把我们带往何处,我们并不知晓,这种讨论的声音也很微弱。然而,技术的演进和跃迁速度非常快,常常会迅速把专家们达成的原则、框架和共识甩在后面。

北京人形机器人创新中心有限公司推出了“天工”号机器人,该机器人正在不同路面进行行走能力的演示,这是由蔡小川拍摄的。
人形机器人产业现今的发展,在很大程度上是以技术和资本的逻辑为基础的。对于它可能引发的失业问题、安全和伦理风险等方面,都缺少与技术发展相契合的研究以及达成共识。技术界和产业界正忙于攻克机器人的技术难关,对布局规模化生产能力投入精力,根本没有时间去顾及这些问题。传统的研究伦理的人文社科学者,他们对于发展得越来越快且越来越艰深的智能技术体系和产业,缺乏深入的以及足够丰富的经验。而这种情况,对他们的研究和思考形成了阻碍。
北京大学刘哲教授在北大组织开设了“人工智能、机器人与伦理”这门课程,此课程需要由五个院系的老师一同教授,然而目前像这样的课程并不多见。他表示,“人形机器人”的概念本身就值得去进行反思,并且伴随着机器人的智能而产生的自主性,已经给人类社会带来了诸多的伦理困境,需要投入更多的社会资源和注意力来对其进行研究。
如果能达成所谓的通用能力,人形机器人就会和人类历史上的蒸汽机不同,和汽车不同,和计算机不同,和手机不同,和所有的单一技术或工具都不一样。它会以具身的形式进入人类的生产场景,进入人类的生活场景,与我们直接进行物理上的接触,与我们直接进行精神上的接触,甚至在很多场景下会接替人类的决策者身份。这会直接对人类的主体性地位造成冲击。我们的道德经验需要重新调整,伦理规范也需要重新调整,法律准则同样需要重新调整。
著名的科幻小说家艾萨克·阿西莫夫在 20 世纪 40 年代提出了一些原则;这些原则被称为“机器人三原则”;这“机器人三原则”具有重要意义。
第一,机器人不得伤害人类,或坐视人类受到伤害;
第二,除非违背第一原则,机器人必须服从人类的命令;
第三,在不违背第一及第二原则下,机器人必须保护自己。
80 年过去了,社会发生了巨大变化,技术环境也发生了巨大变化。我们对这些机器人的认识,似乎还没有超越那些原则。然而,今天的我们,正越来越接近科幻小说里的情节。
